Abstract
With large increases in tourism, it is difficult to maintain parks and preserves in their natural state due to random littering. The purpose of this research project is to develop an automated robot that is capable of maneuvering in a dynamic and unstructured wilderness environment to collect data about the form and distribution of litter. The robot is intended to provide critical information about the commonly contaminated areas and to help tourist sites develop a more efficient method of collecting trash. The distribution patterns will allow for cleaning crews to quickly find trash in common areas, thus reducing laboring costs and helping preserve the natural beauty of the park.
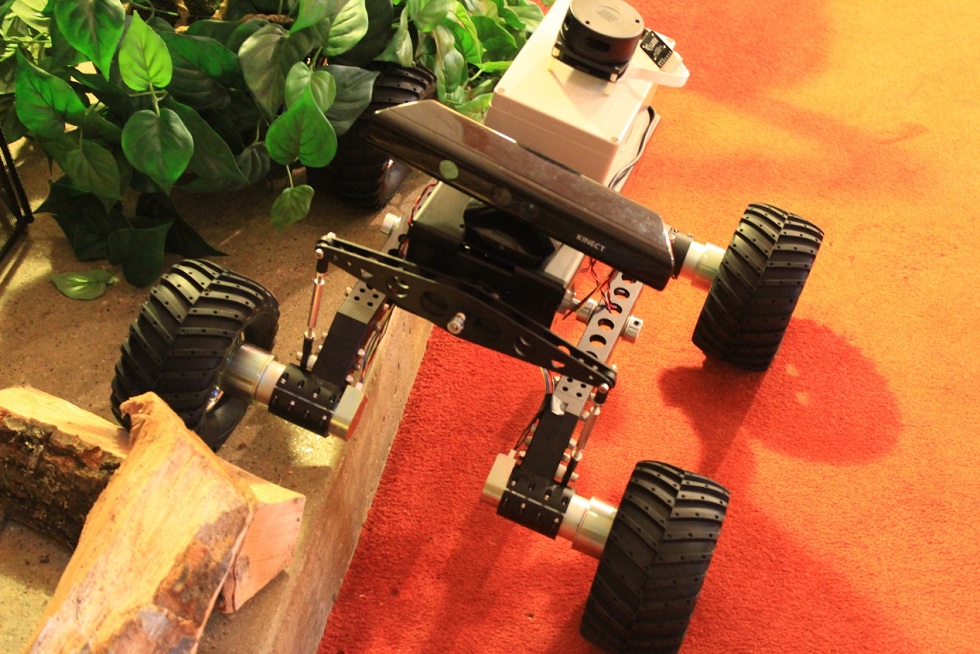
The robot Dali, with laser scanner (top), Kinect RGBD sensor (front), and Intel Core i5-4250U